|
|

楼主 |
发表于 2020-2-4 13:01:50
|
显示全部楼层
就是带你学C带你飞的课后作业S1E12,Servo.h”这个就是那个里面的
这是小甲鱼给的代码
#include <Servo.h>
// 为了方便调用,我们为控制左右电机
// 前进后退的数字引脚进行了宏定义
#define LEFT_MOTO_GO 8
#define LEFT_MOTO_BACK 9
#define RIGHT_MOTO_GO 10
#define RIGHT_MOTO_BACK 11
// ...省略部分代码...
void loop()
{
char ch; // 用于接受命令
switch(ch)
{
case 'g':
digitalWrite(LEFT_MOTO_GO, HIGH);
digitalWrite(LEFT_MOTO_BACK, LOW);
digitalWrite(RIGHT_MOTO_GO, HIGH);
digitalWrite(RIGHT_MOTO_BACK, LOW);
break;
case 'b':
digitalWrite(LEFT_MOTO_GO, LOW);
digitalWrite(LEFT_MOTO_BACK, HIGH);
digitalWrite(RIGHT_MOTO_GO, LOW);
digitalWrite(RIGHT_MOTO_BACK, HIGH);
break;
case 'l':
digitalWrite(LEFT_MOTO_GO, LOW);
digitalWrite(LEFT_MOTO_BACK, LOW);
digitalWrite(RIGHT_MOTO_GO, HIGH);
digitalWrite(RIGHT_MOTO_BACK, LOW);
break;
case 'r':
digitalWrite(LEFT_MOTO_GO, HIGH);
digitalWrite(LEFT_MOTO_BACK, LOW);
digitalWrite(RIGHT_MOTO_GO, LOW);
digitalWrite(RIGHT_MOTO_BACK, LOW);
break;
default:
digitalWrite(LEFT_MOTO_GO, LOW);
digitalWrite(LEFT_MOTO_BACK, LOW);
digitalWrite(RIGHT_MOTO_GO, LOW);
digitalWrite(RIGHT_MOTO_BACK, LOW);
break;
}
// ...省略部分代码...
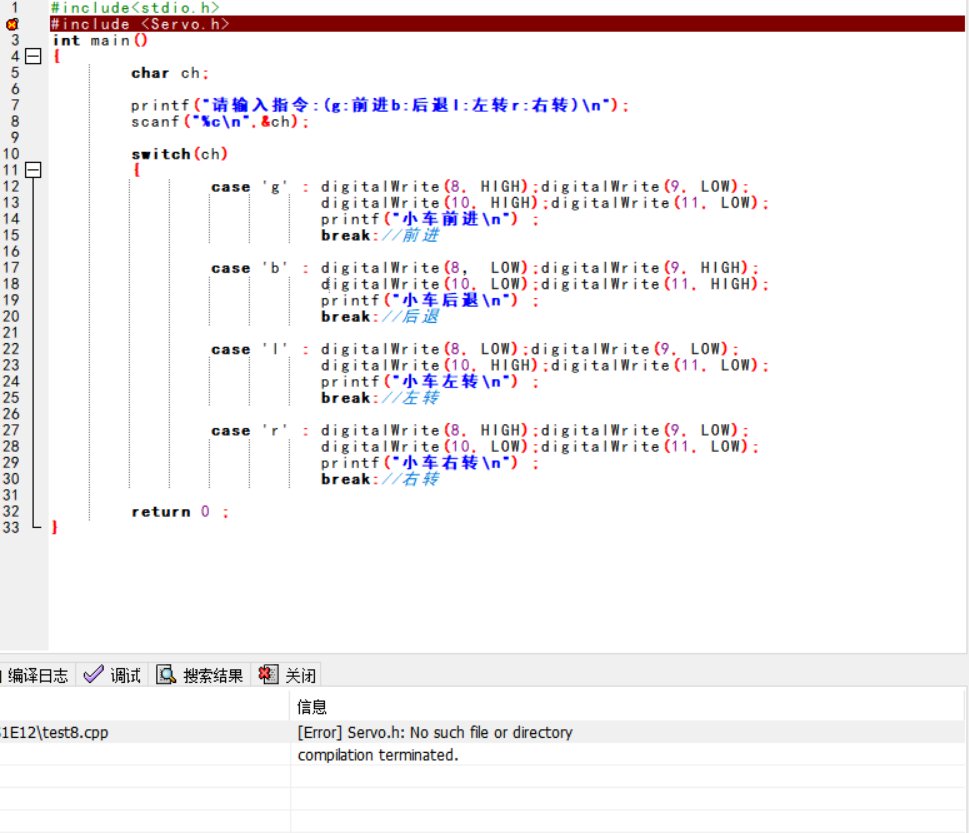
下图是报错的内容
这个到底是为什么啊
|
|
 ( 粤ICP备18085999号-1 | 粤公网安备 44051102000585号)
( 粤ICP备18085999号-1 | 粤公网安备 44051102000585号)

 狗仔卡
狗仔卡 发表于 2020-2-2 23:19:18
发表于 2020-2-2 23:19:18
 置顶卡
置顶卡 千斤顶
千斤顶 显身卡
显身卡 发表于 2020-2-3 01:02:41
发表于 2020-2-3 01:02:41
