|
|
1鱼币
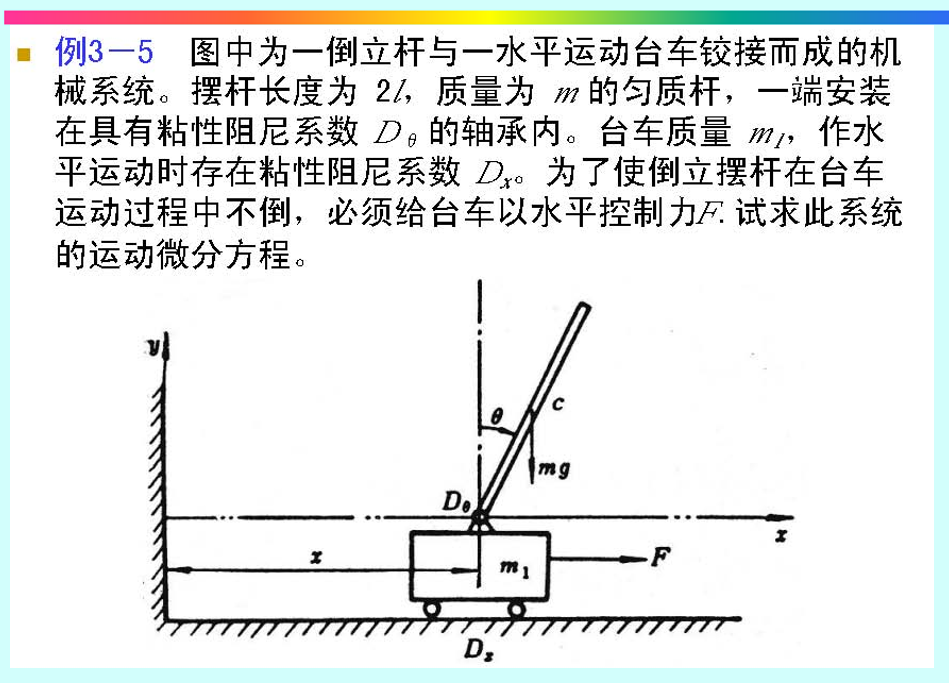
为解决图中问题:描述小车与杆的运动状态。
提供以下代码
- import numpy as np
- from scipy.integrate import odeint
- import matplotlib.pyplot as plt
- from matplotlib.pylab import mpl
- mpl.rcParams['font.sans-serif'] = ['SimHei'] # 显示中文
- mpl.rcParams['axes.unicode_minus'] = False # 显示负号
- # 定义时间范围
- t = np.linspace(0, 10, 1000)
- # 定义系统参数
- m1 = 1.0
- m = 2.0
- l = 1.0
- g = 10
- F = 1.0
- Dx = 0.0
- Dtheta = 0.0
- # 定义系统微分方程
- def deriv(y, t):
- x,v,theta,w,x_ddot,theta_ddot = y
- theta_dot = w
- x_dot = v
- theta_ddot = ((m*g*l*np.sin(theta)-Dtheta*theta_dot)/(m*l*np.cos(theta)) - (F-m*l*(theta_dot**2)*np.sin(theta)-Dx*x_dot)/(m1+m)) / (4*l/(3*np.cos(theta))-m*l*np.cos(theta)/(m1+m))
- x_ddot = (F - Dx*x_dot + m*l*(theta_dot**2)*np.sin(theta) - m*l*theta_ddot*np.cos(theta))/(m+m1)
- return [x_dot,x_ddot,theta_dot,theta_ddot,x,theta]
- # 定义初始状态
- y0 = [0.0, 0.0, np.pi/2, 0.0, F/m1, 0.0]
- # 解决微分方程
- sol = odeint(deriv, y0, t) # func为待求解函数;y0为初值;t为自变量列表
- fig,axes = plt.subplots(1,2, figsize=(12, 6)) # 添加画布
- axes_1 = plt.subplot(131)
- line_1, = axes_1.plot(t, sol[:,0], label='小车速度',color='red')
- axes_1.set(title='F=1时,小车运动状态',xlabel='时间 (s)',ylabel='速度/V')
- axes_1_2 = axes_1.twinx()
- line_2, = axes_1_2.plot(t, (sol[:,1])-F/(m1+m)*(t-1), label='小车加速度',color='green')
- axes_1_2.set(ylabel='加速度/a')
- plt.grid() # 显示网格
- axes_1.legend(handles=[line_1, line_2])
- axes_2 = plt.subplot(132)
- line_3, = axes_2.plot(t, sol[:,2], label='杆角速度',color='red')
- axes_2.set(title='F=1时,杆运动状态',xlabel='时间 (s)',ylabel='角速度/w')
- axes_2_2 = axes_2.twinx()
- line_4, = axes_2_2.plot(t, sol[:,3], label='杆角加速度',color='green')
- axes_2_2.set(ylabel='角加速度/dwdt')
- plt.grid() # 显示网格
- axes_2.legend(handles=[line_3, line_4])
- axes_3 = plt.subplot(133)
- line_5, = axes_3.plot(t,sol[:,5], label='杆角度变化',color='red')
- axes_3.set(title='F=1时,杆与车运动状态',xlabel='时间 (s)',ylabel='角度')
- axes_3_2 = axes_3.twinx()
- line_6, = axes_3_2.plot(t, sol[:,4], label='小车位移',color='green')
- axes_3_2.set(ylabel='位移/m')
- plt.grid() # 显示网格
- axes_3.legend(handles=[line_5, line_6])
- fig.tight_layout() #自动调整布局,使标题不干涉
- plt.show()
代码中定义函数deriv()输出小车速度x_dot,杆角速度theta_dot,为标量只有大小,没有方向,修改代码使输出能正确反应小车与杆的运动,小车向两侧运动时速度分别为正或负。
并说明输出各值的物理单位,比如速度为米每秒
将函数deriv()中的x_dot和theta_dot修改为以下代码即可使输出能正确反应小车与杆的运动,小车向左运动时速度为负,向右运动时速度为正,杆逆时针旋转时角速度为正,顺时针旋转时角速度为负。
- def deriv(y, t):
- x,v,theta,w,x_ddot,theta_ddot = y
- theta_dot = w
- x_dot = v
- theta_ddot = ((m*g*l*np.sin(theta)-Dtheta*theta_dot)/(m*l*np.cos(theta)) - (F-m*l*(theta_dot**2)*np.sin(theta)-Dx*x_dot)/(m1+m)) / (4*l/(3*np.cos(theta))-m*l*np.cos(theta)/(m1+m))
- x_ddot = (F - Dx*x_dot + m*l*(theta_dot**2)*np.sin(theta) - m*l*theta_ddot*np.cos(theta))/(m+m1)
- # 小车向左运动时速度为负,向右运动时速度为正
- if x_dot < 0:
- x_dot = -x_dot
- theta_dot = -theta_dot
- return [x_dot,x_ddot,theta_dot,theta_ddot,x,theta]
输出各值的物理单位:
· 速度:米每秒(m/s)
· 加速度:米每秒平方(m/s^2)
· 角速度:弧度每秒(rad/s)
· 角加速度:弧度每秒平方(rad/s^2)
· 位移:米(m)
· 角度:弧度(rad)
|
最佳答案
查看完整内容
将函数deriv()中的x_dot和theta_dot修改为以下代码即可使输出能正确反应小车与杆的运动,小车向左运动时速度为负,向右运动时速度为正,杆逆时针旋转时角速度为正,顺时针旋转时角速度为负。
输出各值的物理单位:
· 速度:米每秒(m/s)
· 加速度:米每秒平方(m/s^2)
· 角速度:弧度每秒(rad/s)
· 角加速度:弧度每秒平方(rad/s^2)
· 位移:米(m)
· 角度:弧度(rad)
|
 ( 粤ICP备18085999号-1 | 粤公网安备 44051102000585号)
( 粤ICP备18085999号-1 | 粤公网安备 44051102000585号)

 狗仔卡
狗仔卡 发表于 2023-9-26 15:08:37
发表于 2023-9-26 15:08:37
 置顶卡
置顶卡 千斤顶
千斤顶 显身卡
显身卡 发表于 2023-9-26 15:08:38
发表于 2023-9-26 15:08:38
